Webots یک نرمافزار شبیهسازی سهبعدی و قدرتمند در حوزه رباتیک و هوش مصنوعی است. این ابزار توسط Cyberbotics توسعه یافته و اجازه مدلسازی، برنامهنویسی و تست رباتها را با زبانهایی مثل Python، C/C++ و... میدهد. Webots برای آموزش، پژوهش و تست پروژههای صنعتی انتخابی عالی است.
برای مشاهده و دستکاری ربات KUKA Youbot در محیط Webots Cloud، روی تصویر یا دکمه زیر کلیک کنید. محیط شبیهسازی در تب جدید باز میشود.
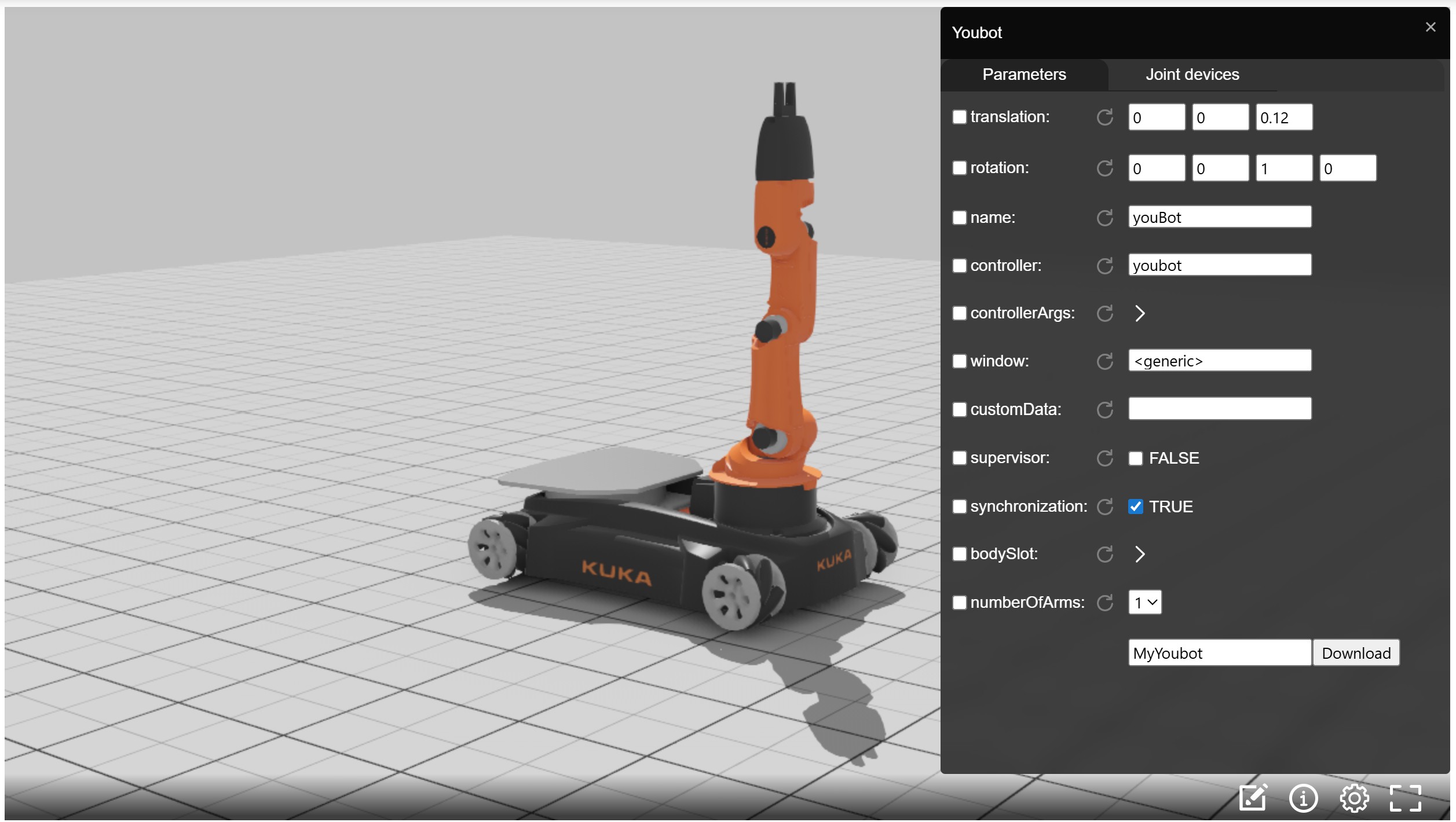 🚀 اجرای شبیهساز آنلاین (KUKA Youbot)
🚀 اجرای شبیهساز آنلاین (KUKA Youbot)
RoboDK یک نرمافزار قدرتمند برای شبیهسازی و برنامهنویسی آفلاین رباتهای صنعتی است که پروژههای رباتیک را برای برندهای مختلفی مثل ABB، KUKA، FANUC، UR، YASKAWA و سایر رباتها ساده و سریع میکند.
بستر استاندارد دنیای رباتیک برای توسعه نرمافزار رباتها در صنایع، دانشگاهها و استارتاپهای خلاق. پشتیبانی گسترده، انعطاف، ماژولار بودن و جهانی شدن با فراتر از ۱۰ هزار پروژه و تیم صنعتی!

نسخه کلاسیک، توسعه فعال جامعه، پایدار برای رباتهای تحقیقاتی و صنعتی سبک.
معماری ماژولار جدید، Real-Time، امنیت بالا و مناسب سیستمهای صنعتی و خودران.
پلتفرم تخصصی برای اتوماسیون و رباتهای صنعتی پیشرفته و خطوط تولید شرکتها.
رباتهای دستیار، نظافتچی، آموزشی، هوشمصنوعی اجتماعی
 رباتهای صنعتی
رباتهای صنعتی
ویژگی: اتوماسیون کارخانه، خطوط تولید، مونتاژ، پیک و پلیس
 خودرانها
خودرانها
ماشین و پهپاد خودران، ناوبری هوشمند، رباتهای نقشهبردار
 تحقیق و آموزش
تحقیق و آموزش
دانشگاهها، پروژههای بینالمللی و رباتهای کلی رده آموزشی
 Debian
Debian
 TU Munich
TU Munich


 EPFL LIS
EPFL LIS